Object Collecting Robot | Simulation and Control with SolidWorks and LabVIEW
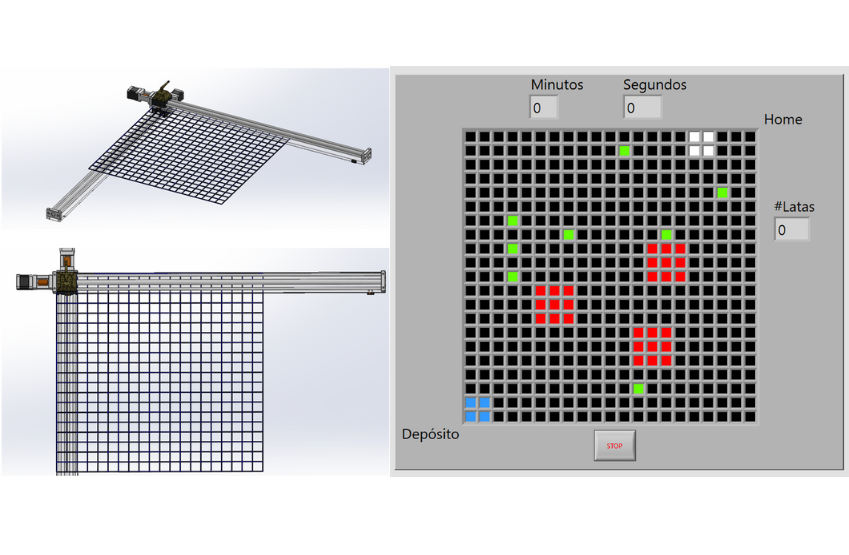
Overview This project consisted in designing, programming, and simulating a virtual cleaning robot in a LabVIEW environment. The robot was tasked with autonomously navigating a predefined arena, identifying and collecting cans, and returning to the container zone without colliding with obstacles. The simulation included interaction with a 3D model built in SolidWorks, where the robot movements from LabVIEW were reflected in real time.
System Behavior The robot starts at a fixed home position It moves one tile at a time in X and/or Y direction (no rotation) Obstacles (3) and cans (8) are randomly placed in a 20x20 arena When a can is detected from one of its four corners, the turret aligns to a contact angle (45º, 135º, 225º, 315º) to simulate grasping The robot dynamically maps obstacles to avoid them Once all cans are collected, the robot must return to the container area within 4 minutes Mathematical Logic Robot movement follows coordinate-based logic, not continuous time Discrete movement:
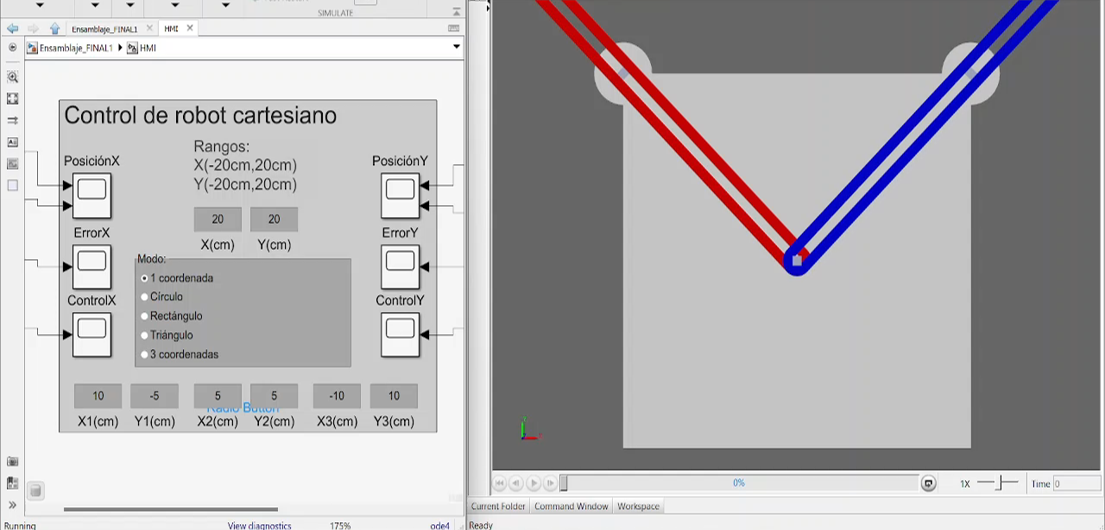
[ (x, y)_{t+1} = (x, y)_t + \Delta x, \Delta y \quad \text{where } \Delta x, \Delta y \in {-1, 0, 1}, |\Delta x| + |\Delta y| \leq 1 ] Turret orientation is selected by conditional quadrant logic Basic pathfinding implemented with coordinate validation and memory of visited positions Tools and Technologies LabVIEW: Main logic engine for control flow, decision-making, and user interface SolidWorks: 3D CAD modeling of the robot and simulation environment Real-Time Integration: Robot movements and control signals generated in LabVIEW were executed in real time within the SolidWorks simulation. Achievements Completed the full simulation successfully in under four minutes Demonstrated autonomous behavior with obstacle avoidance and object retrieval Complete LabVIEW documentation and state-based control design Video