Low-Level Control System | KUKA iDo Robot
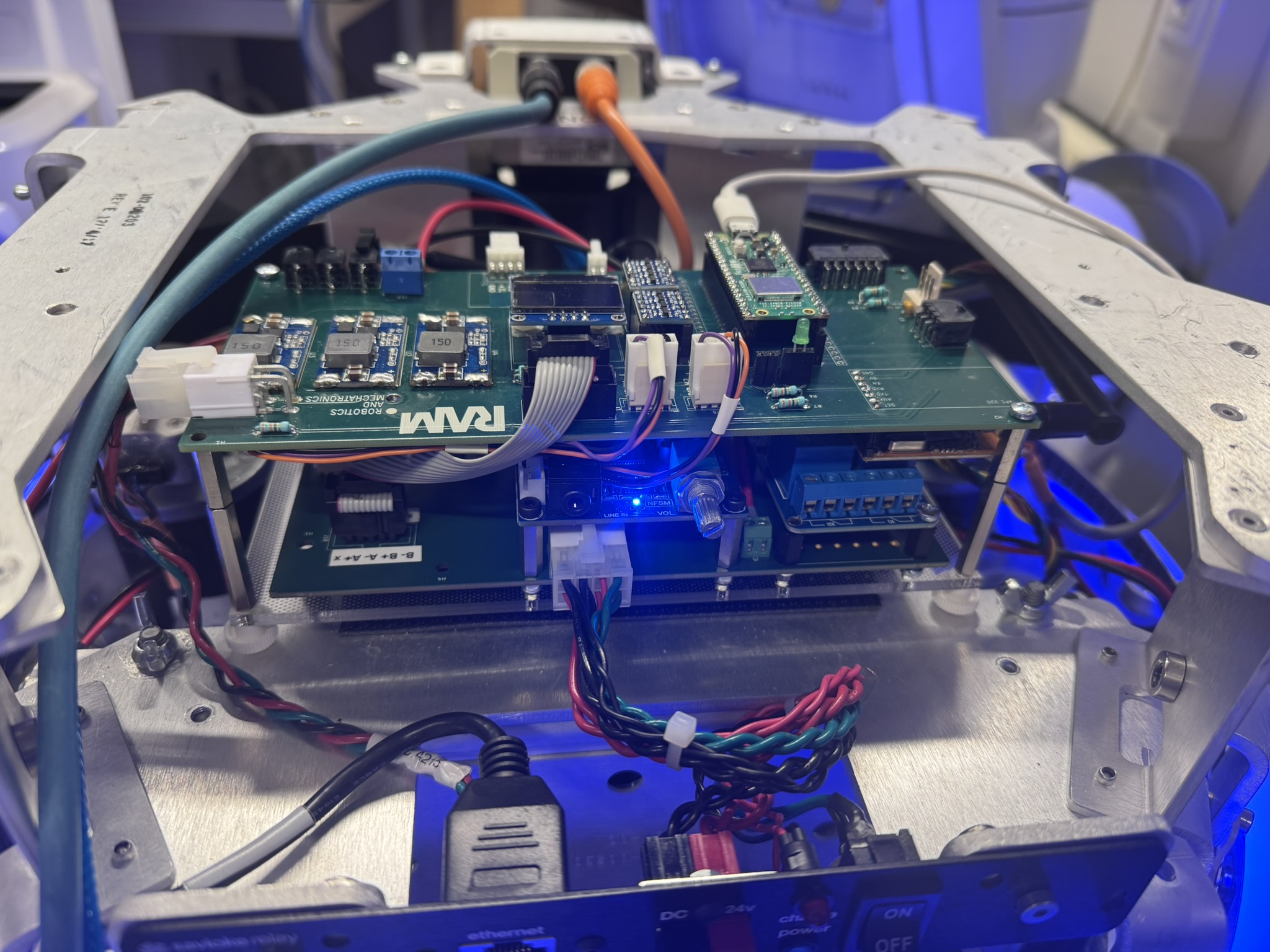
Overview This project corresponds to the development of the low-level control system for the KUKA iDo robot. The system is based on a custom PCB and embedded firmware running on a Raspberry Pi Pico W. It is responsible for real-time motor control, sensor acquisition, and communication with the high-level ROS 2 system via micro-ROS.
The firmware was developed in C++ using the official Pico SDK. All logic is executed within a centralized class that integrates control loops, sensor processing, and communication tasks.