Upright CNC Router | MATLAB Simulation
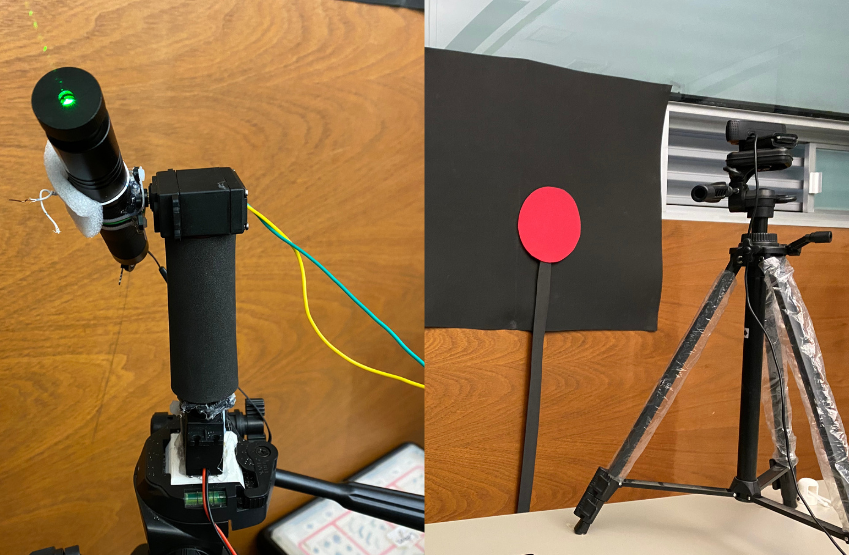
Overview This project consisted of modeling and simulating a vertical CNC router using MATLAB. The system was designed to demonstrate position control over two perpendicular linear axes (X and Y), mimicking the behavior of a basic CNC machine.
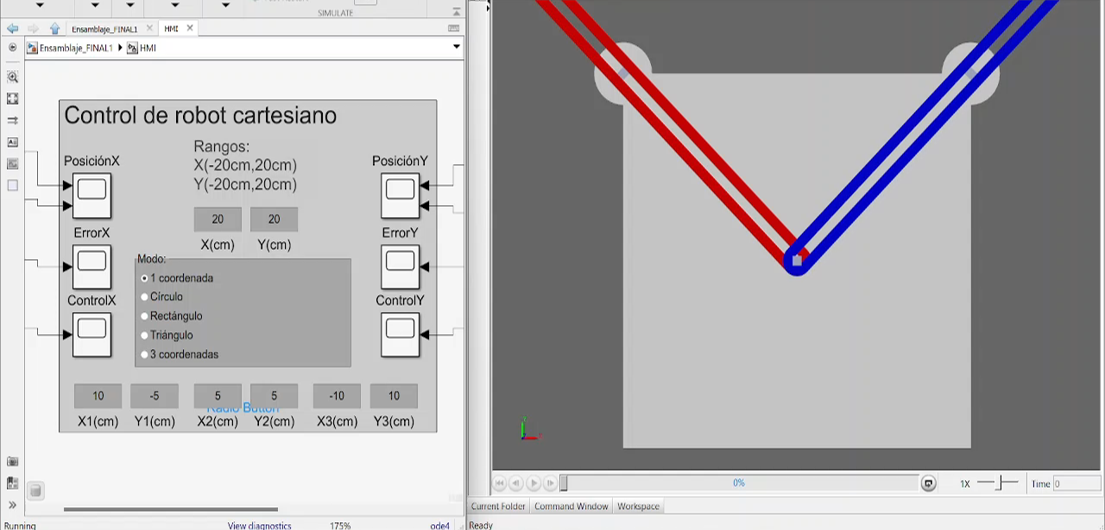
The model includes actuator dynamics, position feedback, and trajectory generation, with the control logic implemented in discrete time using PID controllers.
Key Features 2-axis CNC system simulation Upright router configuration modeled in 3D CAD Discrete PID control implemented in MATLAB Visualization of tool motion and path tracking Position reference generation for square and circular trajectories Technologies Used MATLAB and Simulink Control System Toolbox SolidWorks for mechanical modeling Gallery