Self-Targeting Laser Turret
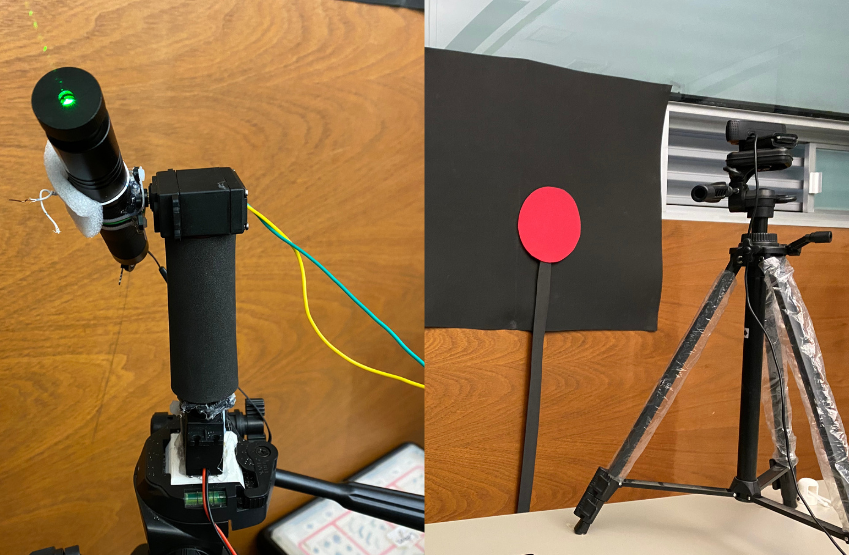
Overview This project involved designing and implementing a two-axis laser turret capable of tracking a moving red circular target in real-time. The system integrates a webcam, MATLAB for image processing, and an Arduino for PID-based actuation. The goal was to keep a laser pointer aimed at the target within a 1 m × 1 m workspace for at least 20 continuous seconds.
System Description The vision subsystem detects the position of a red object using color segmentation in MATLAB. This position is sent to the Arduino through serial communication. The Arduino processes the coordinates and drives two DC motors via a manually tuned PID controller to align the turret accordingly.