Electric Scooter | Mechatronic Design Project
Overview This project focused on the design and development of an electric scooter as part of a mechatronic design course. The process followed a complete engineering methodology including user needs analysis, system architecture, mechanical and electronic design, simulation, and manufacturability evaluation.
The project integrated CAD modeling, structural analysis, circuit design, and simulations to create a functional and realistic design tailored for urban and off-road use.
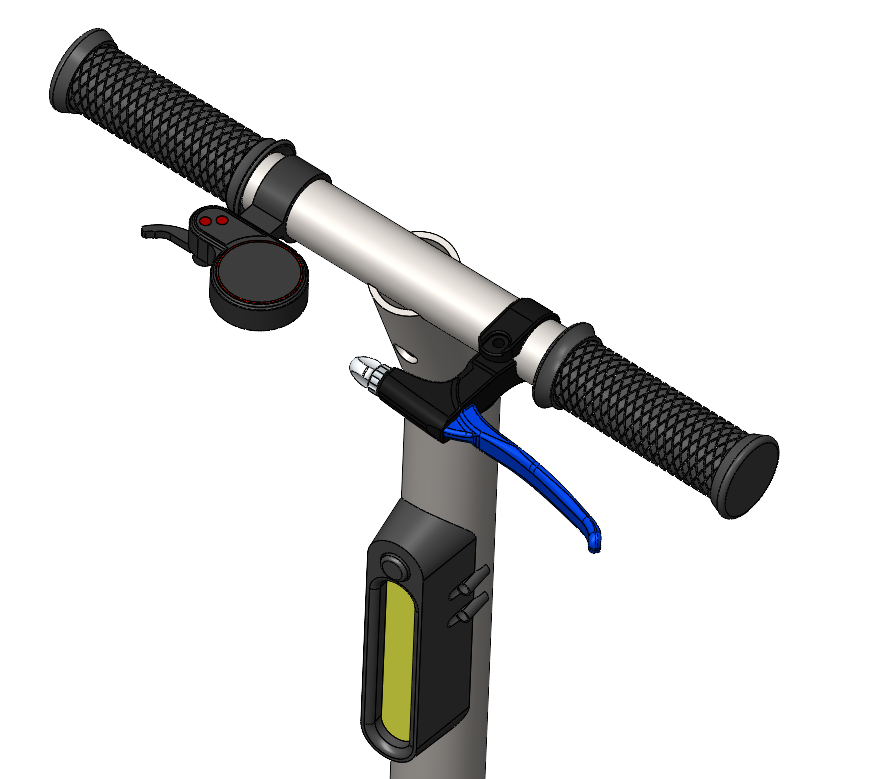
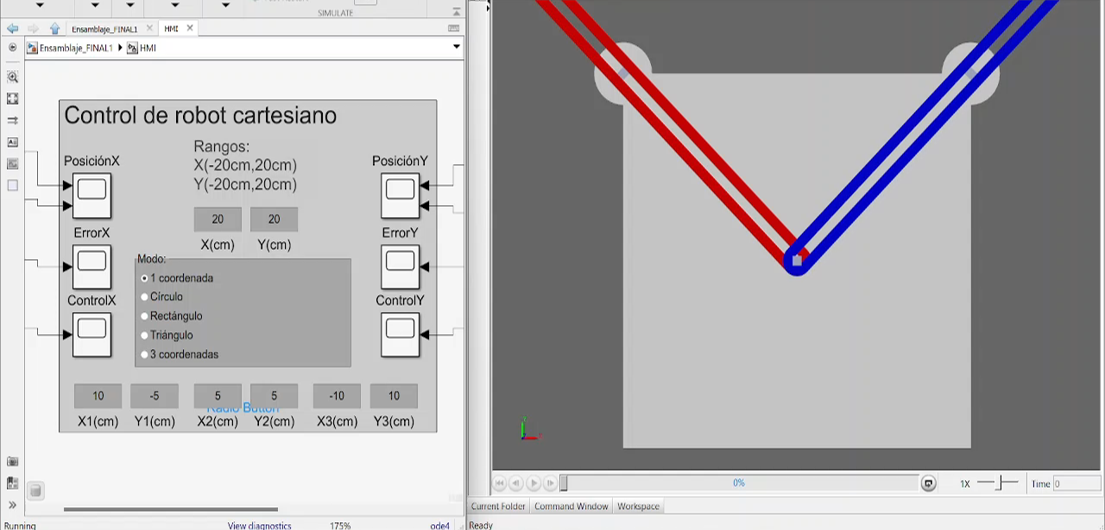
Design Methodology User-Centered Design: Needs analysis using surveys and translation of requirements via QFD and House of Quality System Modeling: Functional decomposition, black-box representation, and system flow diagrams Concept Evaluation: Morphological matrix for idea generation and Pugh chart for selection Mechanical Structure: Modular frame based on aluminum extrusions, foldable design with reinforced hinges Electrical System: Simulated in Proteus, including throttle control, MOSFET-based driver, and LCD feedback display Simulation and Validation: Static structural FEA (Von Mises, displacement) Modal analysis to identify natural frequencies (69.5 Hz to 325.5 Hz) Manufacturing Plan: Designed for low-cost fabrication using conventional tools, avoiding CNC dependence Key Features Max speed over 25 km/h Modular structure using aluminum profiles Foldable mechanism for easy storage Display for battery level and speed feedback Off-road capable wheels Manual and electronic braking systems Cost-effective design (estimated under $12,000 MXN) Technologies Used SolidWorks for 3D modeling and assembly FEA simulation Proteus for circuit simulation Arduino for speed control and display interface Lead-acid or Li-ion battery packs (18650 cells) DC brushed or BLDC in-wheel motors (24V–48V, 250–500 W) Gallery