Gripper Design for Tomato Harvesting
Overview This project was part of an international university challenge focused on autonomous tomato harvesting, conducted in collaboration with Mondragon Unibertsitatea and Tecnológico de Monterrey. The main contribution involved designing and building a functional gripper prototype for the robotic system.
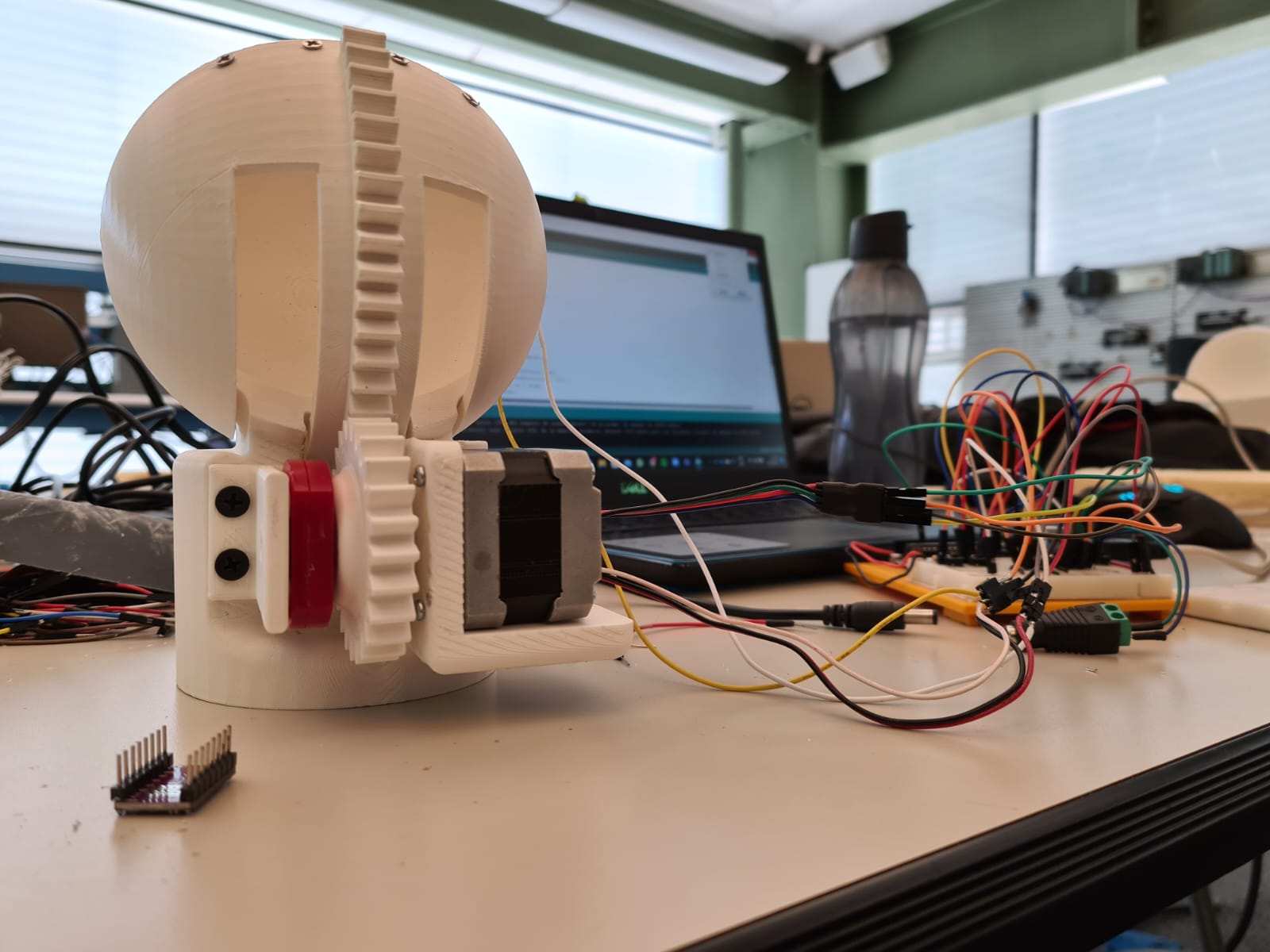
The end-effector was developed using 3D-printed components and included an integrated stepper motor, limit switch, and potentiometer. The control system was implemented on an Arduino UNO, which managed the opening and closing of the gripper based on sensor inputs.